To hover correctly and realistically the ship controller cannot just stay at the same height during all the race. The movement need to be fluid, as if it were on a cushion of air.
For that, we need a variable that will give us the right amount of force to hover but not too much or too low so we don’t overshoot or undershoot our desired height.
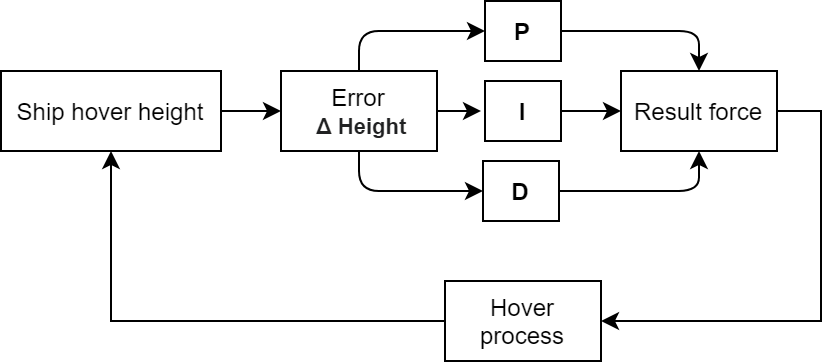
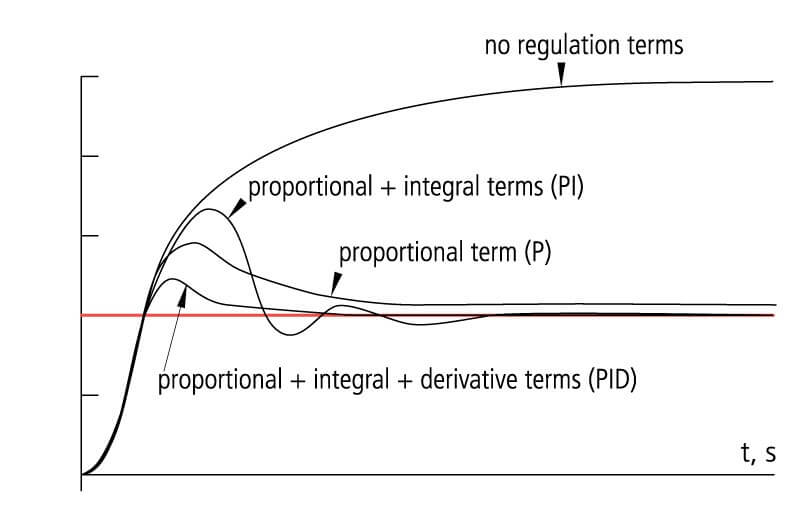
To do so, there is a PID controller, which is a control loop employing a feedback that is mainly used in industrial control systems. A PID controller calculate an error using the desired value we want to obtain and the current value we have now and then give us a value to use in our position correction.
It’s based on the proportional, integral and derivative terms (P, I, D) each value has to be tuned so that the control response is accurate and adapted to our need.
 2021-05-07
2021-05-07